2-Degree-of Freedom Robot Arm
What: For our ME 100 (Electronics for Internet of Things) final project, my teammate and I decided to build a solution for people suffering from arthritis.
Why: 1 in 3 adults in the United States are diagnosed with hand arthritis. Most robotic grippers are expensive and complicated to make.
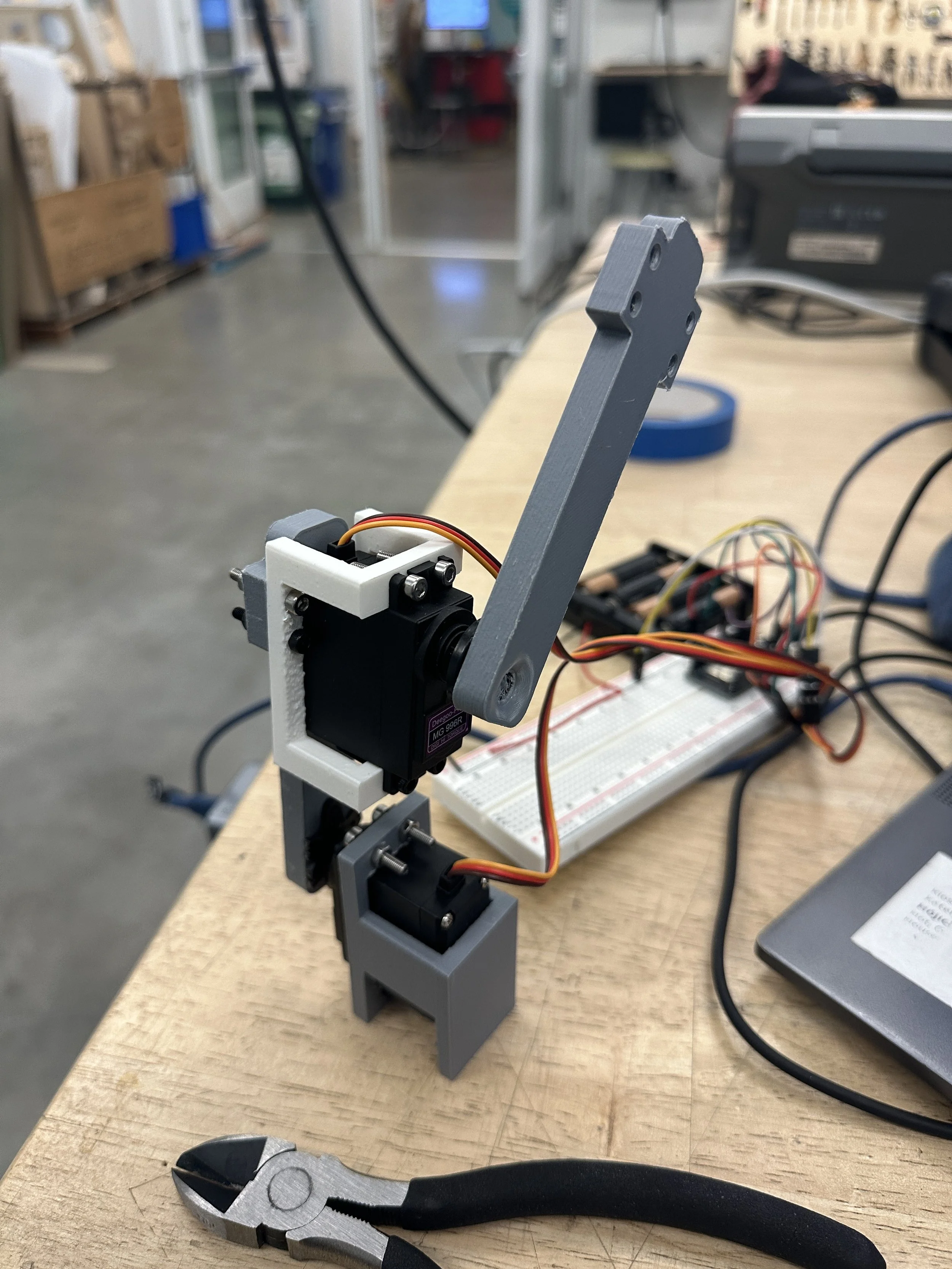
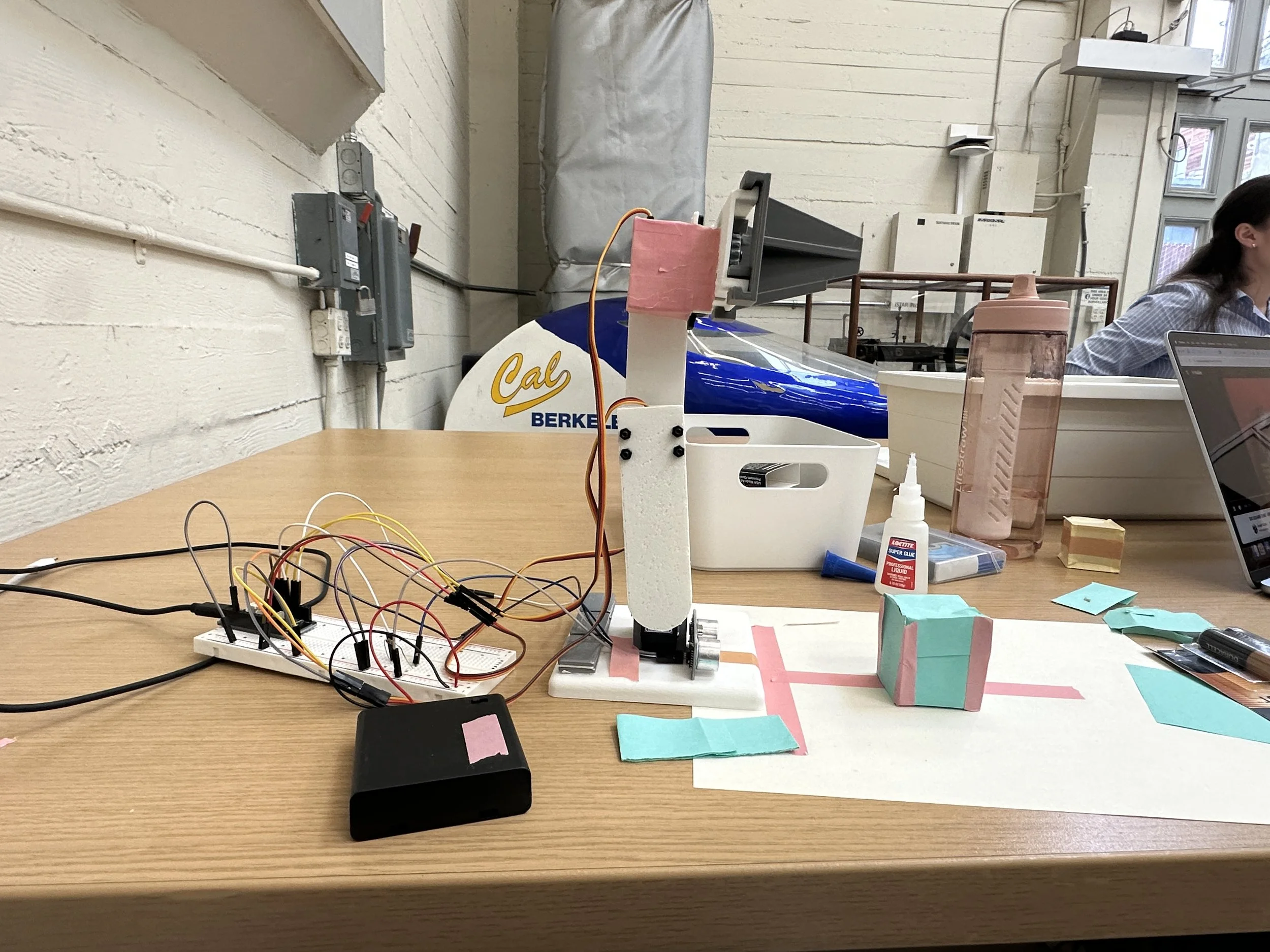
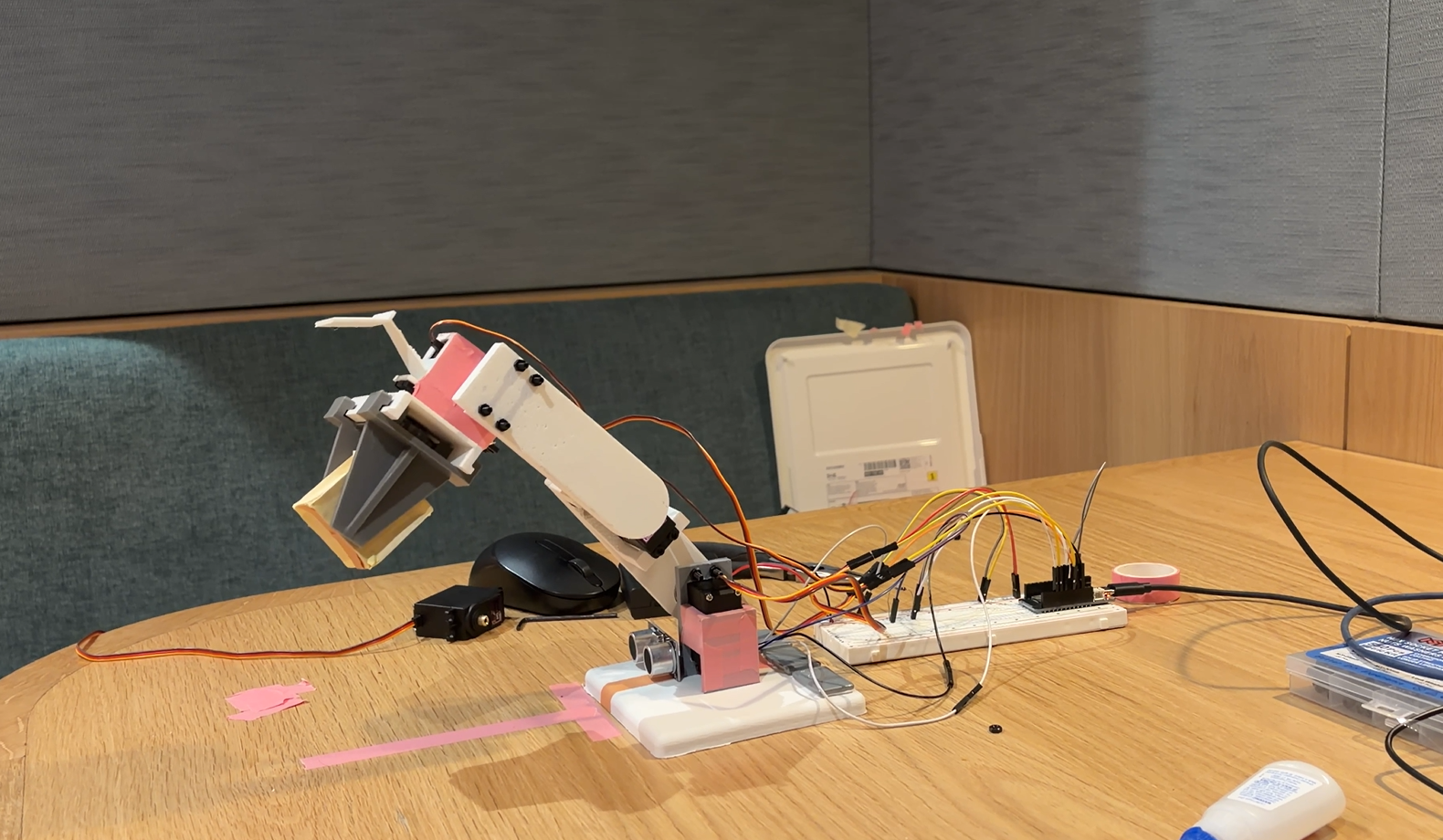
How: I designed the arm and motor mounts in Onshape, and 3D-printed the components using PLA. A calculation was performed to ensure that the end effector of the robot arm has a max deflection of 3 millimeters (see link).
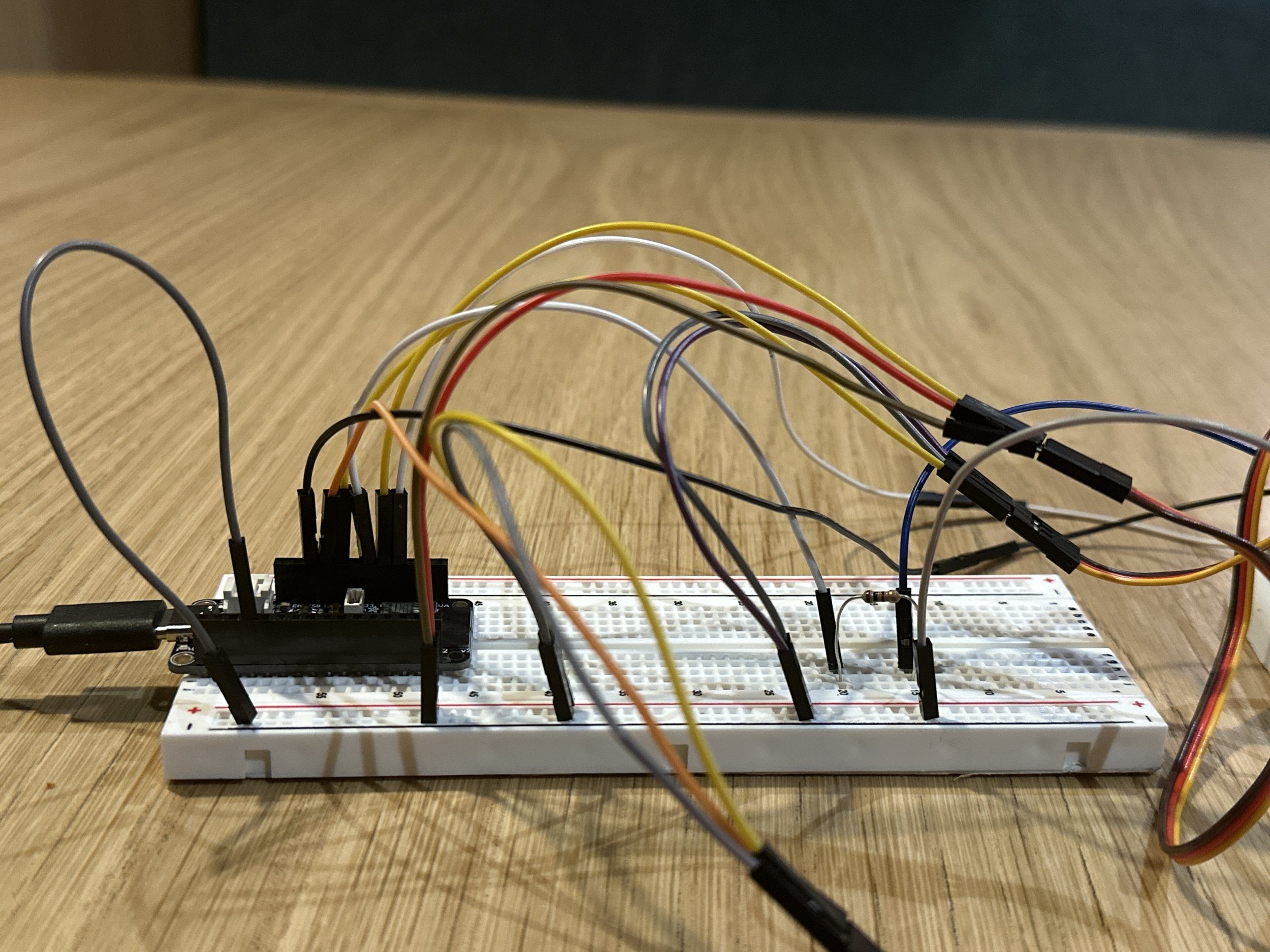
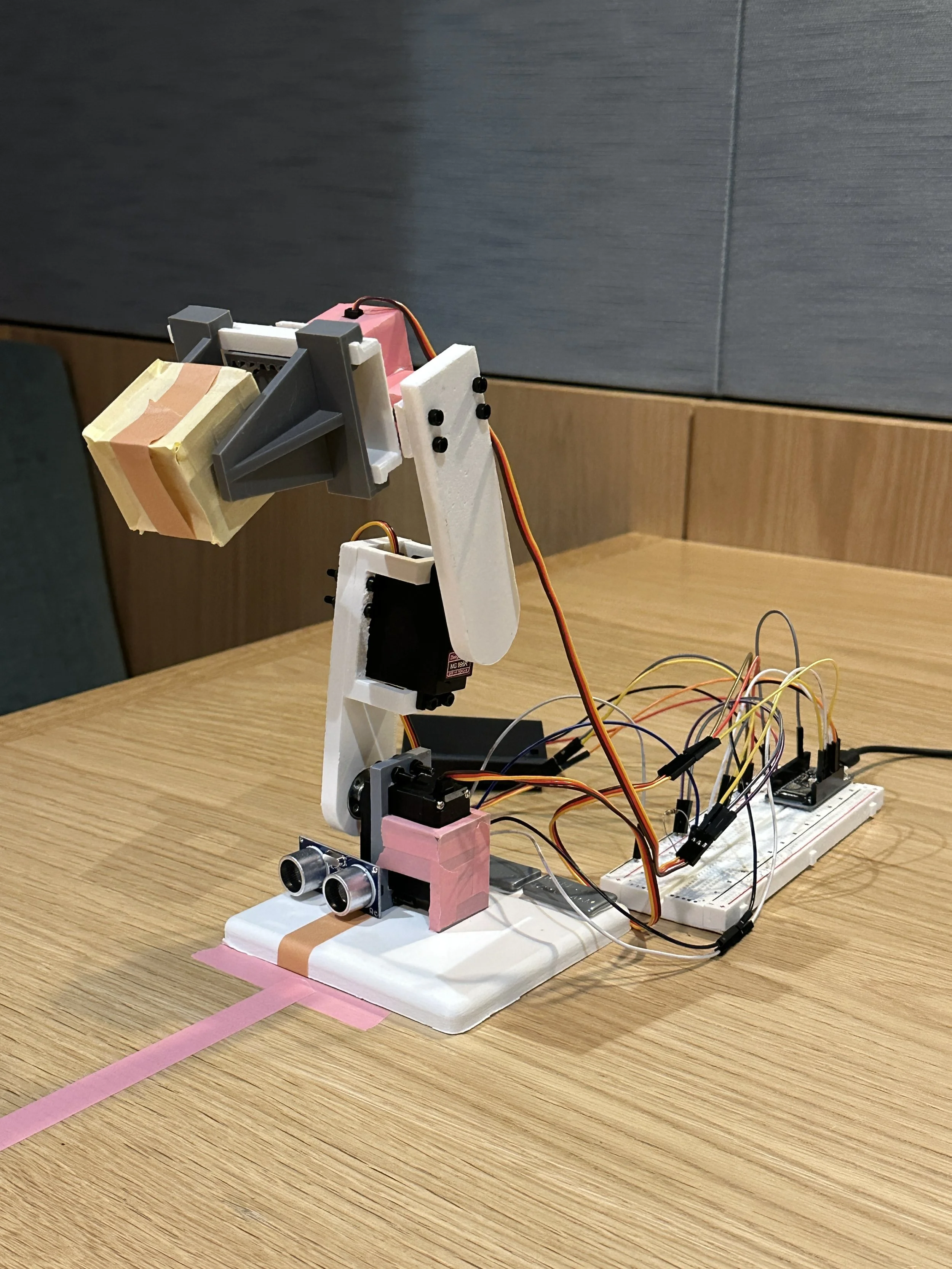
Results: The pick-up sequence is triggered by a button press on a local ESP 32 web server accessed via the user’s phone. Using real-time data collected by the ultrasonic sensor, the target joint angles are calculated to precisely positioned the gripper, which then clamps down on the object.
Links: Slideshow (includes Bill of Materials, Demo Videos), Deflection Calculation